►►► NOS ACTUALITES !
Menu
Produits Magnet-Schultz
Actionneurs électro-magnétiques
Electro-aimants linéaires
Electro-aimants linéaires à corps ouvert
Electro-aimants miniatures
Electro-aimants bi-stable
Electro-aimants vibreurs
Electro-aimants AC
Electro-aimants antidéflagrant ATEX
Ventouses électro-magnétiques
Ventouses électro-magnétiques à émission
Ventouses électro-magnétiques à rupture
Capteurs et Electroniques de commande
Capteurs
Electroniques de commande
Electro-aimants rotatifs
Electro-aimants vibreurs AC
Verrous électro-magnétiques
Electrovannes pour application hydraulique
Electrovannes pour application hydrogène
Accessoires pour électro-aimants
Electrovannes pour application pneumatique
Applications ATEX
Applications
BMS
Aimantation
Démagnétisation
Mesure de champ magnétique
Accouplements magnétiques
Préhension magnétique
Séparation Magnétique pour l'agroalimentaire
Dépression
Magnet-Schultz
Pneumatique
Hydraulique
Technologie Médicale
Aérospatial
Electromécanique
Automobile
Contact
Téléchargements
Documentation BMS
Documentation Magnet-Schultz
Demande de prix
Entreprise
Nos Prestations
Qui sommes-nous ?
Produits BMS
Aimants de levage & Accessoires robot
Aimants électro-permanents
Electro-aimants
Aimants à batterie
Accessoires magnétiques de manutention
Palonniers fixes et réglables
Porteurs magnétiques permanents
Accessoires de tri et séparation magnétique pour l'agroalimentaire
Grilles et barreaux magnétiques
Plaques magnétiques extractrices
Poulies et tambours magnétiques
Cône magnétique
Plateaux et pompes pour bridage par dépression
Plateaux et Mandrin à dépression
Groupes et pompes à vide
Accessoires à dépression
Systèmes magnétiques de nettoyage
Aimants et ventouses permanents
Accessoires Magnétiques
Ventouses magnétiques
Aimants bruts
Tunnels et tables démagnétiseurs
Plateaux démagnétiseurs
Tunnels démagnétiseurs
Appareils de démagnétisation
Démagnétiseurs à main
Appareils de mesure de champ magnétique
Coupleurs magnétiques
FR
DE
UK
Accueil
>
Applications
>
BMS
>
Préhension magnétique
>
Préhension et Robotisation
Préhension et Robotisation
11
résultats
Tri :
Alphabétique
Préhenseur électropermanent pour robotisation
Photo(s) (10)
+ d'infos
Porteur à aimants permanents pneumatique Type BHP-PN
Photo(s) (4)
+ d'infos
Réglette à aimants permanents à activation pneumatique
Photo(s) (2)
+ d'infos
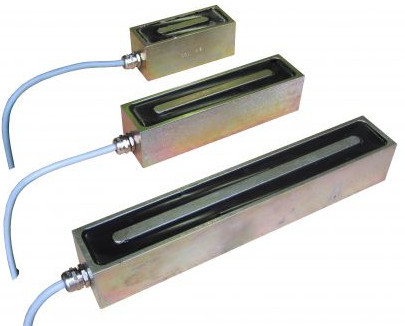
Réglette électromagnétique type REM
Photo(s) (4)
+ d'infos
Ventouse électromagnétique type VEM
Photo(s) (7)
+ d'infos
Porteur électropermanent à pôles carrés type PEP-SQ
Photo(s) (6)
+ d'infos
Ventouse à aimants permanents à activation pneumatique
Photo(s) (5)
+ d'infos
Ventouse électropermanente Type VEP-SQ
Photo(s) (3)
+ d'infos
Ventouse permanente-électrique type GMPX
Photo(s) (2)
+ d'infos
Ventouse électromagnétique type GMHX
+ d'infos
REGLETTE ELECTROPERMANENTE TYPE REP-R
+ d'infos